Joint state returned by jcalc. More...
#include <joint.H>
Public Member Functions | |
| XSvc () | |
| Null constructor. | |
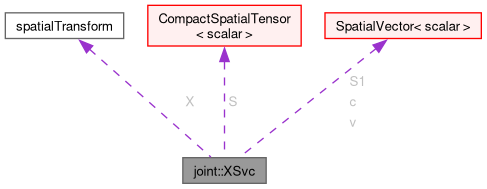
Public Attributes | |
| spatialTransform | X |
| The joint transformation. | |
| compactSpatialTensor | S |
| The joint motion sub-space (3-DoF). | |
| spatialVector | S1 |
| The joint motion sub-space (1-DoF). | |
| spatialVector | v |
| The constrained joint velocity. | |
| spatialVector | c |
| The constrained joint acceleration correction. | |
|
inline |
The joint transformation.
Definition at line 142 of file joint.H.
Referenced by rigidBodyModel::forwardDynamics(), rigidBodyModel::forwardDynamicsCorrection(), Pa::jcalc(), Px::jcalc(), Pxyz::jcalc(), Py::jcalc(), Pz::jcalc(), Ra::jcalc(), Rs::jcalc(), Rx::jcalc(), Rxyz::jcalc(), Ry::jcalc(), Ryxz::jcalc(), Rz::jcalc(), Rzyx::jcalc(), and XSvc().
The joint motion sub-space (3-DoF).
Definition at line 147 of file joint.H.
Referenced by rigidBodyModel::forwardDynamics(), rigidBodyModel::forwardDynamicsCorrection(), Pxyz::jcalc(), Rs::jcalc(), Rxyz::jcalc(), Ryxz::jcalc(), and Rzyx::jcalc().
The joint motion sub-space (1-DoF).
Definition at line 152 of file joint.H.
Referenced by rigidBodyModel::forwardDynamics(), rigidBodyModel::forwardDynamicsCorrection(), Pa::jcalc(), Px::jcalc(), Py::jcalc(), Pz::jcalc(), Ra::jcalc(), Rx::jcalc(), Ry::jcalc(), and Rz::jcalc().
The constrained joint velocity.
Definition at line 157 of file joint.H.
Referenced by rigidBodyModel::forwardDynamics(), rigidBodyModel::forwardDynamicsCorrection(), Pa::jcalc(), Px::jcalc(), Pxyz::jcalc(), Py::jcalc(), Pz::jcalc(), Ra::jcalc(), Rs::jcalc(), Rx::jcalc(), Rxyz::jcalc(), Ry::jcalc(), Ryxz::jcalc(), Rz::jcalc(), Rzyx::jcalc(), and XSvc().
The constrained joint acceleration correction.
due to changes in the motion sub-space S
Definition at line 164 of file joint.H.
Referenced by rigidBodyModel::forwardDynamics(), rigidBodyModel::forwardDynamicsCorrection(), Pa::jcalc(), Px::jcalc(), Pxyz::jcalc(), Py::jcalc(), Pz::jcalc(), Ra::jcalc(), Rs::jcalc(), Rx::jcalc(), Rxyz::jcalc(), Ry::jcalc(), Ryxz::jcalc(), Rz::jcalc(), Rzyx::jcalc(), and XSvc().
 1.16.1
1.16.1 