#include <rigidBodyInertia.H>
Public Member Functions | |
| rigidBodyInertia () | |
| Null constructor, initializes to zero. | |
| rigidBodyInertia (const scalar m, const vector &c, const symmTensor &Ic) | |
| Construct from mass, centre of mass and moment of inertia tensor. | |
| rigidBodyInertia (const dictionary &dict) | |
| Construct from dictionary. | |
| rigidBodyInertia (const spatialTensor &st) | |
| Construct from the components of a spatial tensor. | |
| rigidBodyInertia (Istream &is) | |
| Construct from Istream. | |
| scalar | m () const |
| Return the mass of the rigid-body. | |
| const vector & | c () const |
| Return the centre of mass of the rigid-body. | |
| const symmTensor & | Ic () const |
| Return the inertia tensor of the rigid-body about the centre of mass. | |
| symmTensor | Ioc () const |
| Return the difference between the inertia tensor of the rigid-body. | |
| symmTensor | Icc (const vector &c) const |
| Return the difference between the inertia tensor of the rigid-body. | |
| symmTensor | Io () const |
| Return the inertia tensor of the rigid-body about the origin. | |
| scalar | kineticEnergy (const spatialVector &v) |
| Return the kinetic energy of the body with the given velocity. | |
| operator spatialTensor () const | |
| Conversion to spatial tensor. | |
| void | operator+= (const rigidBodyInertia &) |
Static Public Member Functions | |
| static symmTensor | Ioc (const scalar m, const vector &c) |
| Return the difference between the inertia tensor of the rigid-body. | |
Friends | |
| Istream & | operator>> (Istream &, rigidBodyInertia &) |
| Ostream & | operator<< (Ostream &, const rigidBodyInertia &) |
Definition at line 68 of file rigidBodyInertia.H.
|
inline |
Null constructor, initializes to zero.
Definition at line 40 of file rigidBodyInertiaI.H.
References Foam::Zero.
Referenced by cuboid::cuboid(), rigidBody::declareRunTimeSelectionTable(), operator+=(), operator<<, operator>>, rigidBody::rigidBody(), rigidBody::rigidBody(), rigidBody::rigidBody(), and sphere::sphere().
|
inline |
Construct from mass, centre of mass and moment of inertia tensor.
about the centre of mass
Definition at line 48 of file rigidBodyInertiaI.H.
References c(), Ic(), and m().
|
inline |
|
inlineexplicit |
Construct from the components of a spatial tensor.
Definition at line 69 of file rigidBodyInertiaI.H.
References Ioc(), and Foam::symm().
|
inlineexplicit |
Construct from Istream.
Definition at line 77 of file rigidBodyInertiaI.H.
|
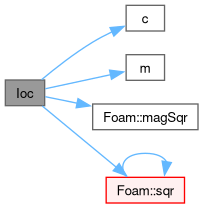
inlinestatic |
Return the difference between the inertia tensor of the rigid-body.
about the origin - about the centre of mass for the given mass and centre of mass
Definition at line 28 of file rigidBodyInertiaI.H.
References c(), Foam::I, m(), Foam::magSqr(), and Foam::sqr().
Referenced by Icc(), Io(), Ioc(), and rigidBodyInertia().
|
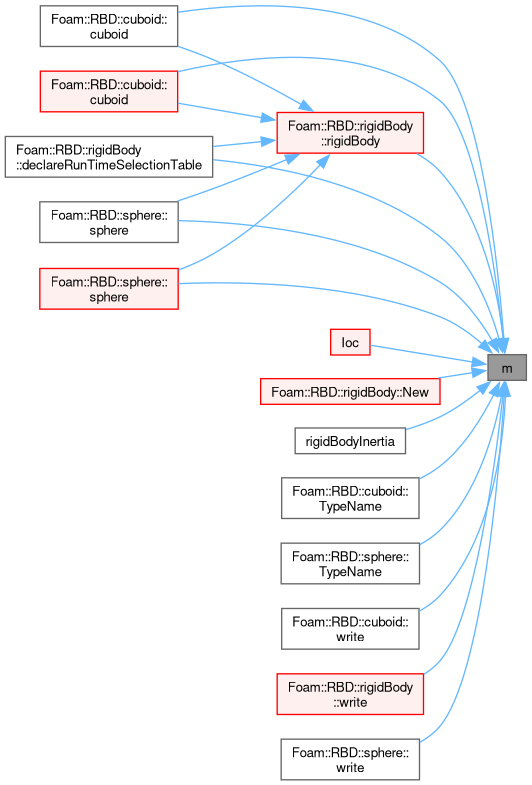
inline |
Return the mass of the rigid-body.
Definition at line 87 of file rigidBodyInertiaI.H.
Referenced by cuboid::cuboid(), cuboid::cuboid(), rigidBody::declareRunTimeSelectionTable(), Ioc(), rigidBody::New(), rigidBody::rigidBody(), rigidBodyInertia(), sphere::sphere(), sphere::sphere(), cuboid::TypeName(), sphere::TypeName(), cuboid::write(), rigidBody::write(), and sphere::write().
|
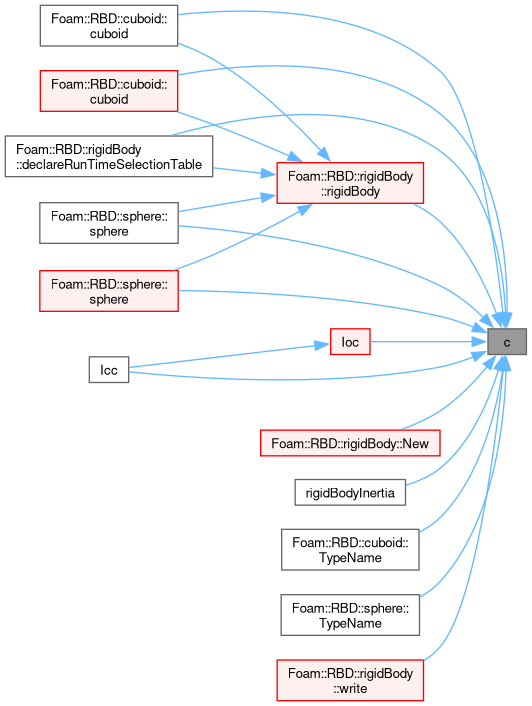
inline |
Return the centre of mass of the rigid-body.
Definition at line 92 of file rigidBodyInertiaI.H.
Referenced by cuboid::cuboid(), cuboid::cuboid(), rigidBody::declareRunTimeSelectionTable(), Icc(), Ioc(), rigidBody::New(), rigidBody::rigidBody(), rigidBodyInertia(), sphere::sphere(), sphere::sphere(), cuboid::TypeName(), sphere::TypeName(), and rigidBody::write().
|
inline |
Return the inertia tensor of the rigid-body about the centre of mass.
Definition at line 97 of file rigidBodyInertiaI.H.
Referenced by rigidBody::declareRunTimeSelectionTable(), rigidBody::New(), rigidBody::rigidBody(), rigidBodyInertia(), and rigidBody::write().
|
inline |
Return the difference between the inertia tensor of the rigid-body.
about the origin - about the centre of mass
Definition at line 102 of file rigidBodyInertiaI.H.
References Ioc().
|
inline |
Return the difference between the inertia tensor of the rigid-body.
about the a new centre of mass - about the current centre of mass
Definition at line 107 of file rigidBodyInertiaI.H.
|
inline |
Return the inertia tensor of the rigid-body about the origin.
Definition at line 112 of file rigidBodyInertiaI.H.
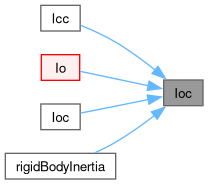
References Ioc().
Referenced by operator spatialTensor().

|
inline |
Return the kinetic energy of the body with the given velocity.
Definition at line 234 of file rigidBodyInertiaI.H.
|
inline |
Conversion to spatial tensor.
Definition at line 120 of file rigidBodyInertiaI.H.

|
inline |
Definition at line 245 of file rigidBodyInertiaI.H.
References rigidBodyInertia().

|
friend |
References rigidBodyInertia().
|
friend |
References rigidBodyInertia().
 1.16.1
1.16.1 