Non-pointer based hierarchical recursive searching. More...
#include <indexedOctree.H>
Public Member Functions | |
| indexedOctree (const Type &shapes) | |
| Construct null. | |
| indexedOctree (const Type &shapes, const List< node > &nodes, const List< labelList > &contents) | |
| Construct from components. | |
| indexedOctree (const Type &shapes, const treeBoundBox &bb, const label maxLevels, const scalar maxLeafRatio, const scalar maxDuplicity) | |
| Construct from shapes. | |
| indexedOctree (const Type &shapes, Istream &is) | |
| Construct from Istream. | |
| autoPtr< indexedOctree< Type > > | clone () const |
| Clone. | |
| const Type & | shapes () const noexcept |
| Reference to shape. | |
| const List< node > & | nodes () const noexcept |
| List of all nodes. | |
| const List< labelList > & | contents () const noexcept |
| List of all contents (referenced by those nodes that are contents). | |
| PackedList< 2 > & | nodeTypes () const noexcept |
| Per node, per octant whether is fully inside/outside/mixed. | |
| const treeBoundBox & | bb () const |
| Top bounding box. | |
| label | nLeafs () const |
| Return the number of leaf nodes. | |
| pointIndexHit | findNearest (const point &sample, const scalar nearestDistSqr) const |
| template<class FindNearestOp> | |
| pointIndexHit | findNearest (const point &sample, const scalar nearestDistSqr, const FindNearestOp &fnOp) const |
| Calculate nearest point on nearest shape. | |
| template<class FindNearestOp> | |
| void | findNearest (const label nodeI, const point &, scalar &nearestDistSqr, label &nearestShapeI, point &nearestPoint, const FindNearestOp &fnOp) const |
| Low level: calculate nearest starting from subnode. | |
| pointIndexHit | findNearest (const linePointRef &ln, treeBoundBox &tightest, point &linePoint) const |
| Find nearest to line. | |
| template<class FindNearestOp> | |
| pointIndexHit | findNearest (const linePointRef &ln, treeBoundBox &tightest, point &linePoint, const FindNearestOp &fnOp) const |
| pointIndexHit | findLine (const point &start, const point &end) const |
| Find nearest intersection of line between start and end. | |
| pointIndexHit | findLineAny (const point &start, const point &end) const |
| Find any intersection of line between start and end. | |
| template<class FindIntersectOp> | |
| pointIndexHit | findLine (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| Find nearest intersection of line between start and end. | |
| template<class FindIntersectOp> | |
| pointIndexHit | findLineAny (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| Find any intersection of line between start and end. | |
| bool | overlaps (const treeBoundBox &bb) const |
| True if any shapes overlap the bounding box. | |
| labelList | findBox (const treeBoundBox &bb) const |
| Find indices of all shapes inside or overlapping a bounding box (i.e. all shapes not outside box). | |
| label | findBox (const treeBoundBox &bb, labelHashSet &elements) const |
| Find indices of all shapes inside or overlapping a bounding box (i.e. all shapes not outside box). | |
| bool | overlaps (const point ¢re, const scalar radiusSqr) const |
| True if any shapes overlap the bounding sphere. | |
| labelList | findSphere (const point ¢re, const scalar radiusSqr) const |
| Find indices of all shapes inside or overlapping a bounding sphere (i.e. all shapes not outside a sphere). | |
| label | findSphere (const point ¢re, const scalar radiusSqr, labelHashSet &elements) const |
| Find indices of all shapes inside or overlapping a bounding sphere (i.e. all shapes not outside sphere). | |
| labelBits | findNode (const label nodeI, const point &) const |
| Find deepest node (as parent+octant) containing point. Starts. | |
| label | findInside (const point &) const |
| Find shape containing point. Only implemented for certain. | |
| const labelList & | findIndices (const point &) const |
| Find the shape indices that occupy the result of findNode. | |
| volumeType | getVolumeType (const point &) const |
| Determine type (inside/outside/mixed) for point. unknown if. | |
| template<class CompareOp> | |
| void | findNear (const scalar nearDist, const indexedOctree< Type > &tree2, CompareOp &cop) const |
| Find near pairs and apply CompareOp to them. | |
| void | writeOBJ (Ostream &os) const |
| Write (non-empty) tree boxes in OBJ format. | |
| void | print (prefixOSstream &, const bool printContents, const label) const |
| Print tree. Either print all indices (printContent = true) or. | |
| bool | write (Ostream &os) const |
| template<class FindIntersectOp> | |
| Foam::pointIndexHit | findLine (const bool findAny, const point &treeStart, const point &treeEnd, const label startNodeI, const direction startOctant, const FindIntersectOp &fiOp, const bool verbose) const |
| template<class FindIntersectOp> | |
| Foam::pointIndexHit | findLine (const bool findAny, const point &start, const point &end, const FindIntersectOp &fiOp) const |
| template<class FindNearestOp> | |
| Foam::pointIndexHit | findNearest (const point &sample, const scalar startDistSqr, const FindNearestOp &fnOp) const |
| template<class FindNearestOp> | |
| Foam::pointIndexHit | findNearest (const linePointRef &ln, treeBoundBox &tightest, point &linePoint, const FindNearestOp &fnOp) const |
| template<class FindIntersectOp> | |
| Foam::pointIndexHit | findLine (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| template<class FindIntersectOp> | |
| Foam::pointIndexHit | findLineAny (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| Public Member Functions inherited from indexedOctreeBase | |
| ClassName ("indexedOctree") | |
| Runtime type information. | |
| indexedOctreeBase ()=default | |
| Default construct. | |
Static Public Member Functions | |
| static volumeType | getSide (const vector &outsideNormal, const vector &vec) |
| Helper function to return the side. Returns outside if. | |
| Static Public Member Functions inherited from indexedOctreeBase | |
| static bool | isEmpty (labelBits i) noexcept |
| An empty node - no content. | |
| static bool | isContent (labelBits i) noexcept |
| Node with content (leaf). | |
| static bool | isNode (labelBits i) noexcept |
| A parent node. | |
| static label | getContent (labelBits i) |
| Return real (dereferenced) index for a content node. | |
| static label | getNode (const labelBits i) |
| Return real (dereferenced) index for a parent node. | |
| static direction | getOctant (labelBits i) noexcept |
| Return sub-node direction/octant. | |
| static scalar & | perturbTol () noexcept |
| Get the perturbation tolerance. | |
| static scalar | perturbTol (scalar tol) noexcept |
| Set the perturbation tolerance, return the old value. | |
| static void | writeOBJ (Ostream &os, const treeBoundBox &bb, label &vertIndex, const bool writeLinesOnly=false) |
| Write treeBoundBox in OBJ format. | |
Friends | |
| Ostream & | operator<< (Ostream &, const indexedOctree< Type > &) |
Additional Inherited Members | |
| Static Protected Member Functions inherited from indexedOctreeBase | |
| static labelBits | emptyPlusOctant (direction octant) |
| From empty to subNodes_ entry. | |
| static labelBits | contentPlusOctant (label i, direction octant) |
| From index into contents_ to subNodes_ entry. | |
| static labelBits | nodePlusOctant (label i, direction octant) |
| From index into nodes_ to subNodes_ entry. | |
| Static Protected Attributes inherited from indexedOctreeBase | |
| static scalar | perturbTol_ = 10*SMALL |
| Relative perturbation tolerance. | |
Non-pointer based hierarchical recursive searching.
Definition at line 295 of file indexedOctree.H.
| indexedOctree | ( | const Type & | shapes | ) |
Construct null.
Definition at line 2111 of file indexedOctree.C.
References shapes().
Referenced by findNear().


| indexedOctree | ( | const Type & | shapes, |
| const List< node > & | nodes, | ||
| const List< labelList > & | contents ) |
Construct from components.
Definition at line 2121 of file indexedOctree.C.
References contents(), nodes(), and shapes().
| indexedOctree | ( | const Type & | shapes, |
| const treeBoundBox & | bb, | ||
| const label | maxLevels, | ||
| const scalar | maxLeafRatio, | ||
| const scalar | maxDuplicity ) |
Construct from shapes.
Definition at line 2136 of file indexedOctree.C.
References bb(), contents(), Foam::endl(), Foam::identity(), Foam::max(), Foam::min(), Foam::nl, nodes(), Foam::Pout, shapes(), memInfo::size(), and while().
| indexedOctree | ( | const Type & | shapes, |
| Istream & | is ) |
Construct from Istream.
Definition at line 2315 of file indexedOctree.C.
References shapes().

|
inline |
Clone.
Definition at line 650 of file indexedOctree.H.
|
inlinenoexcept |
Reference to shape.
Definition at line 663 of file indexedOctree.H.
Referenced by patchFieldProbe::findElements(), mappedPatchBase::findLocalSamples(), refinementFeatures::findNearestRegionEdge(), indexedOctree(), indexedOctree(), indexedOctree(), indexedOctree(), surfaceFeatures::nearestEdges(), surfaceFeatures::nearestFeatEdge(), surfaceFeatures::nearestSamples(), surfaceFeatures::nearestSurfEdge(), and surfaceFeatures::nearestSurfEdge().
List of all nodes.
Definition at line 668 of file indexedOctree.H.
Referenced by distributedTriSurfaceMesh::distribute(), distributedTriSurfaceMesh::getVolumeType(), indexedOctree(), and indexedOctree().
List of all contents (referenced by those nodes that are contents).
Definition at line 674 of file indexedOctree.H.
Referenced by indexedOctree(), and indexedOctree().
|
inlinenoexcept |
Per node, per octant whether is fully inside/outside/mixed.
Definition at line 682 of file indexedOctree.H.
Referenced by distributedTriSurfaceMesh::distribute(), and distributedTriSurfaceMesh::getVolumeType().
|
inline |
Top bounding box.
Definition at line 690 of file indexedOctree.H.
Referenced by patchFieldProbe::findElements(), findNear(), getVolumeType(), indexedOctree(), surfaceFeatures::nearestSamples(), and print().
| Foam::label nLeafs | ( | ) | const |
Return the number of leaf nodes.
Definition at line 2876 of file indexedOctree.C.
| Foam::pointIndexHit findNearest | ( | const point & | sample, |
| const scalar | nearestDistSqr ) const |
Definition at line 2331 of file indexedOctree.C.
| pointIndexHit findNearest | ( | const point & | sample, |
| const scalar | nearestDistSqr, | ||
| const FindNearestOp & | fnOp ) const |
Calculate nearest point on nearest shape.
Returns
| void findNearest | ( | const label | nodeI, |
| const point & | sample, | ||
| scalar & | nearestDistSqr, | ||
| label & | nearestShapeI, | ||
| point & | nearestPoint, | ||
| const FindNearestOp & | fnOp ) const |
Low level: calculate nearest starting from subnode.
Definition at line 389 of file indexedOctree.C.
References indexedOctreeBase::node::bb_, indexedOctreeBase::getContent(), indexedOctreeBase::getNode(), indexedOctreeBase::isContent(), indexedOctreeBase::isNode(), treeBoundBox::overlaps(), treeBoundBox::searchOrder(), indexedOctreeBase::node::subNodes_, and treeBoundBox::subOverlaps().
| Foam::pointIndexHit findNearest | ( | const linePointRef & | ln, |
| treeBoundBox & | tightest, | ||
| point & | linePoint ) const |
Find nearest to line.
Returns
Definition at line 2380 of file indexedOctree.C.
References Foam::ln().

| pointIndexHit findNearest | ( | const linePointRef & | ln, |
| treeBoundBox & | tightest, | ||
| point & | linePoint, | ||
| const FindNearestOp & | fnOp ) const |
| Foam::pointIndexHit findLine | ( | const point & | start, |
| const point & | end ) const |
Find nearest intersection of line between start and end.
Definition at line 2432 of file indexedOctree.C.
| Foam::pointIndexHit findLineAny | ( | const point & | start, |
| const point & | end ) const |
Find any intersection of line between start and end.
Definition at line 2449 of file indexedOctree.C.
Referenced by triSurfaceSearch::findLineAny().

| pointIndexHit findLine | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp ) const |
Find nearest intersection of line between start and end.
| pointIndexHit findLineAny | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp ) const |
Find any intersection of line between start and end.
| bool overlaps | ( | const treeBoundBox & | bb | ) | const |
True if any shapes overlap the bounding box.
Definition at line 2492 of file indexedOctree.C.
| Foam::labelList findBox | ( | const treeBoundBox & | bb | ) | const |
Find indices of all shapes inside or overlapping a bounding box (i.e. all shapes not outside box).
| bb | bound box limits |
Definition at line 2526 of file indexedOctree.C.
References HashTable< T, Key, Hash >::toc().

| Foam::label findBox | ( | const treeBoundBox & | bb, |
| labelHashSet & | elements ) const |
Find indices of all shapes inside or overlapping a bounding box (i.e. all shapes not outside box).
| bb | bound box limits | |
| [out] | elements | elements found |
Definition at line 2503 of file indexedOctree.C.
References HashTable< T, Key, Hash >::clear(), Foam::max(), HashTable< T, Key, Hash >::reserve(), and HashTable< T, Key, Hash >::size().
| bool overlaps | ( | const point & | centre, |
| const scalar | radiusSqr ) const |
True if any shapes overlap the bounding sphere.
| centre | centre of bound sphere |
| radiusSqr | radius^2 of sphere |
Definition at line 2546 of file indexedOctree.C.
| Foam::labelList findSphere | ( | const point & | centre, |
| const scalar | radiusSqr ) const |
Find indices of all shapes inside or overlapping a bounding sphere (i.e. all shapes not outside a sphere).
| centre | centre of bound sphere |
| radiusSqr | radius^2 of sphere |
Definition at line 2583 of file indexedOctree.C.
References HashTable< T, Key, Hash >::toc().

| Foam::label findSphere | ( | const point & | centre, |
| const scalar | radiusSqr, | ||
| labelHashSet & | elements ) const |
Find indices of all shapes inside or overlapping a bounding sphere (i.e. all shapes not outside sphere).
| centre | centre of bound sphere | |
| radiusSqr | radius^2 of sphere | |
| [out] | elements | elements found |
Definition at line 2558 of file indexedOctree.C.
References HashTable< T, Key, Hash >::clear(), Foam::max(), HashTable< T, Key, Hash >::reserve(), and HashTable< T, Key, Hash >::size().
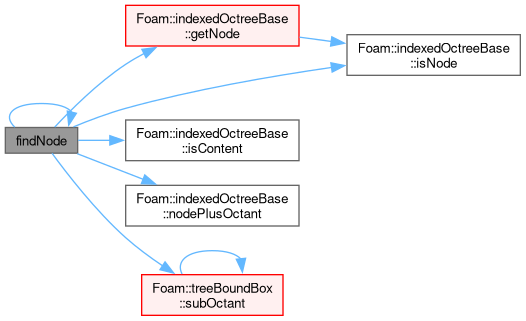
| Foam::labelBits findNode | ( | const label | nodeI, |
| const point & | sample ) const |
Find deepest node (as parent+octant) containing point. Starts.
off from starting index in nodes_ (use 0 to start from top) Use getNode and getOctant to extract info, or call findIndices.
Definition at line 2604 of file indexedOctree.C.
References indexedOctreeBase::node::bb_, findNode(), indexedOctreeBase::getNode(), indexedOctreeBase::isContent(), indexedOctreeBase::isNode(), indexedOctreeBase::nodePlusOctant(), indexedOctreeBase::node::subNodes_, and treeBoundBox::subOctant().
Referenced by findIndices(), findInside(), and findNode().
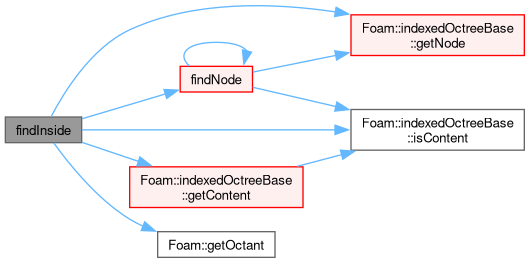
| Foam::label findInside | ( | const point & | sample | ) | const |
Find shape containing point. Only implemented for certain.
shapes.
Definition at line 2641 of file indexedOctree.C.
References findNode(), forAll, indexedOctreeBase::getContent(), indexedOctreeBase::getNode(), Foam::getOctant(), indexedOctreeBase::isContent(), and indexedOctreeBase::node::subNodes_.
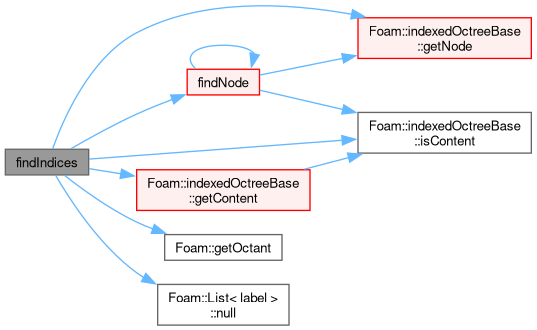
| const Foam::labelList & findIndices | ( | const point & | sample | ) | const |
Find the shape indices that occupy the result of findNode.
Definition at line 2675 of file indexedOctree.C.
References findNode(), indexedOctreeBase::getContent(), indexedOctreeBase::getNode(), Foam::getOctant(), indexedOctreeBase::isContent(), List< label >::null(), and indexedOctreeBase::node::subNodes_.
| Foam::volumeType getVolumeType | ( | const point & | sample | ) | const |
Determine type (inside/outside/mixed) for point. unknown if.
cannot be determined (e.g. non-manifold surface)
Definition at line 2702 of file indexedOctree.C.
References Foam::abort(), bb(), Foam::endl(), Foam::FatalError, FatalErrorInFunction, forAll, volumeType::INSIDE, volumeType::MIXED, volumeType::OUTSIDE, Foam::Pout, and volumeType::UNKNOWN.
|
static |
Helper function to return the side. Returns outside if.
outsideNormal&vec >= 0, inside otherwise
Definition at line 370 of file indexedOctree.C.
References volumeType::INSIDE, and volumeType::OUTSIDE.
Referenced by treeDataFace::getVolumeType(), and treeDataPrimitivePatch< primitivePatch >::findSelfIntersectOp::operator()().
| void findNear | ( | const scalar | nearDist, |
| const indexedOctree< Type > & | tree2, | ||
| CompareOp & | cop ) const |
Find near pairs and apply CompareOp to them.
tree2 can be *this or different tree.
Definition at line 2772 of file indexedOctree.C.
References bb(), indexedOctree(), and indexedOctreeBase::nodePlusOctant().
| void writeOBJ | ( | Ostream & | os | ) | const |
Write (non-empty) tree boxes in OBJ format.
Definition at line 2097 of file indexedOctree.C.
References os().
| void print | ( | prefixOSstream & | os, |
| const bool | printContents, | ||
| const label | nodeI ) const |
Print tree. Either print all indices (printContent = true) or.
just size of contents nodes.
Definition at line 2798 of file indexedOctree.C.
References bb(), indexedOctreeBase::node::bb_, Foam::endl(), forAll, indexedOctreeBase::getContent(), indexedOctreeBase::getNode(), indexedOctreeBase::isContent(), indexedOctreeBase::isNode(), Foam::nl, indexedOctreeBase::nodePlusOctant(), os(), indexedOctreeBase::node::parent_, print(), UList< T >::size(), and indexedOctreeBase::node::subNodes_.
Referenced by print().

| bool write | ( | Ostream & | os | ) | const |
Definition at line 2889 of file indexedOctree.C.
References os().
| Foam::pointIndexHit findLine | ( | const bool | findAny, |
| const point & | treeStart, | ||
| const point & | treeEnd, | ||
| const label | startNodeI, | ||
| const direction | startOctant, | ||
| const FindIntersectOp & | fiOp, | ||
| const bool | verbose ) const |
Definition at line 1414 of file indexedOctree.C.
| Foam::pointIndexHit findLine | ( | const bool | findAny, |
| const point & | start, | ||
| const point & | end, | ||
| const FindIntersectOp & | fiOp ) const |
Definition at line 1606 of file indexedOctree.C.
| Foam::pointIndexHit findNearest | ( | const point & | sample, |
| const scalar | startDistSqr, | ||
| const FindNearestOp & | fnOp ) const |
Definition at line 2348 of file indexedOctree.C.
| Foam::pointIndexHit findNearest | ( | const linePointRef & | ln, |
| treeBoundBox & | tightest, | ||
| point & | linePoint, | ||
| const FindNearestOp & | fnOp ) const |
Definition at line 2399 of file indexedOctree.C.
| Foam::pointIndexHit findLine | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp ) const |
Definition at line 2467 of file indexedOctree.C.
| Foam::pointIndexHit findLineAny | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp ) const |
Definition at line 2480 of file indexedOctree.C.
|
friend |
 1.16.1
1.16.1 